






I'd like to introduce.......
"SMARTY and SWIFT"
.......my autonomous "Cybug" machines!
I know you've seen this bots before in some of my creations, but anyway...here we go!
"Smarty" is one of my old robot, that can do such a task independently. Independently? Yes! Smarty has a built-in "hunger instinct" circuitry, designed and created by Craig Maynard. His site is www.jcminventures.com at Cybug Central, where you could find its schematics and much more. His cybug bots are kinda' different from mine. This type of robot can be made in different ways and behaviors. I've also created a similar design of his cybug, which I named it "Swift" (speed/quickness). Swift moves quite fast and active, also has some similar electronics as Smarty. The only difference is their motors. Don't worry...you'll also see Swift here. :-)
So, let's talk about Smarty and its feeding station...
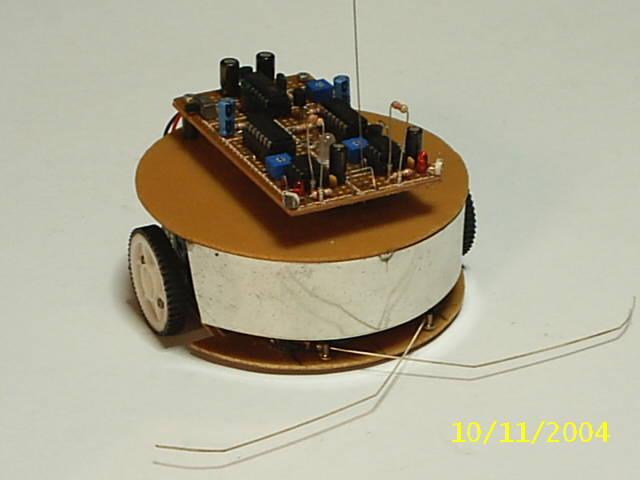
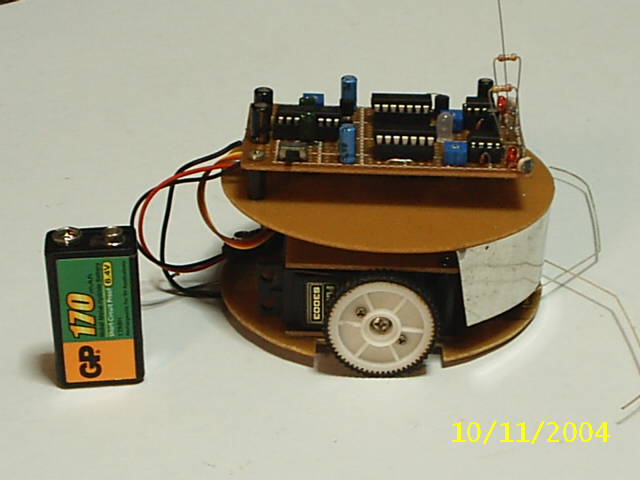
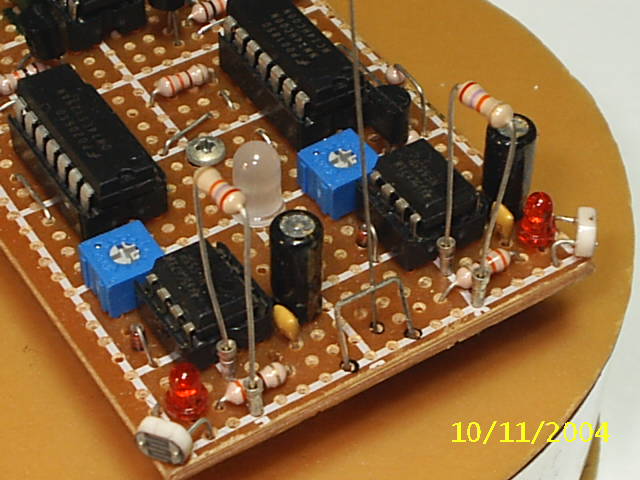
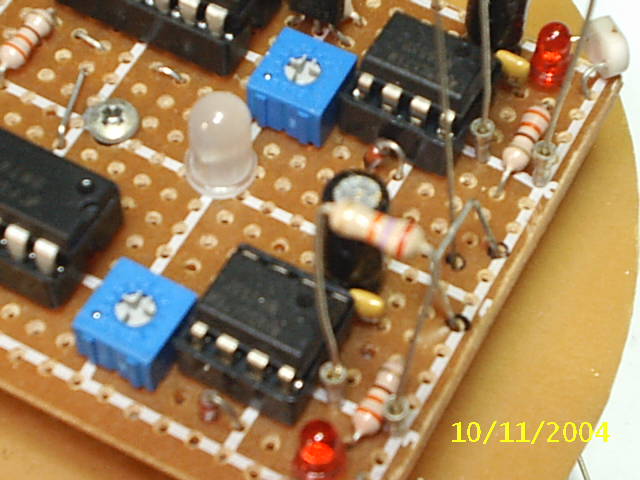
Smarty has 2 independent light sensors and 2 tactile sensors or bump switches to avoid any obstruction in its path. It has a light indicator (dual-color LED-red and green) indicating if it's hungry or not. It also has its own unique feeding station (specially designed by me), that enables him to charge its own batteries for several minutes or so. Just like any automatic doors that opens by itself when someone comes in (in some malls or hotels). I'm sure you gonna love the videos later on.
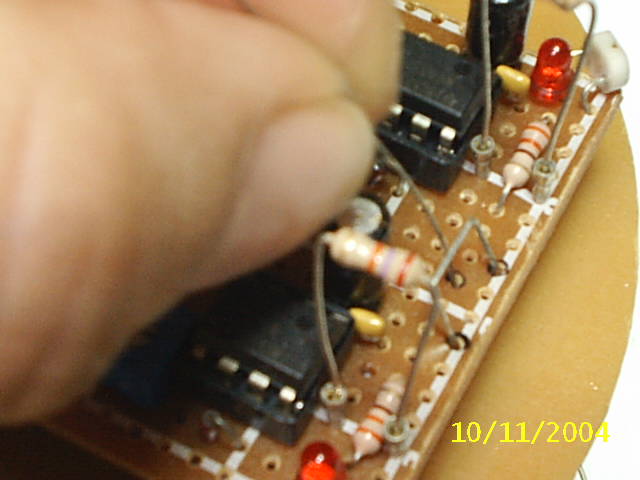
--- PICS ---
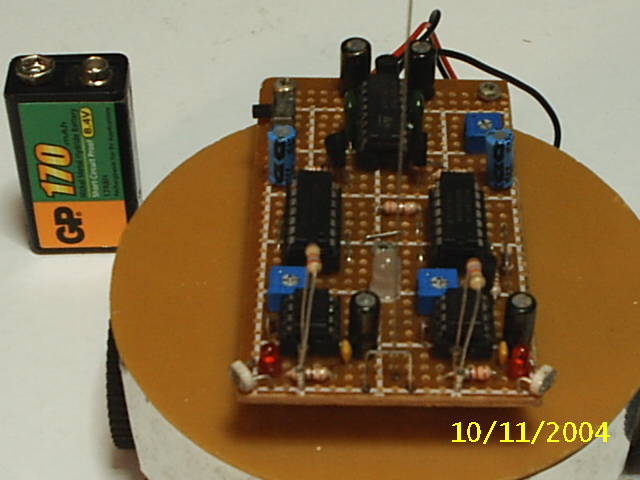
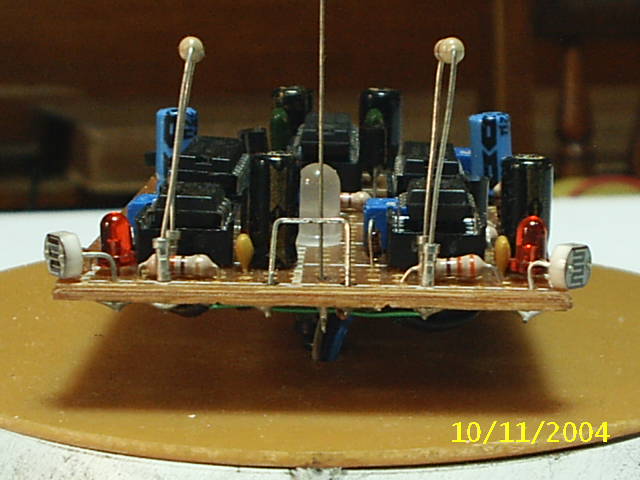
"Smarty"
(click to enlarge)
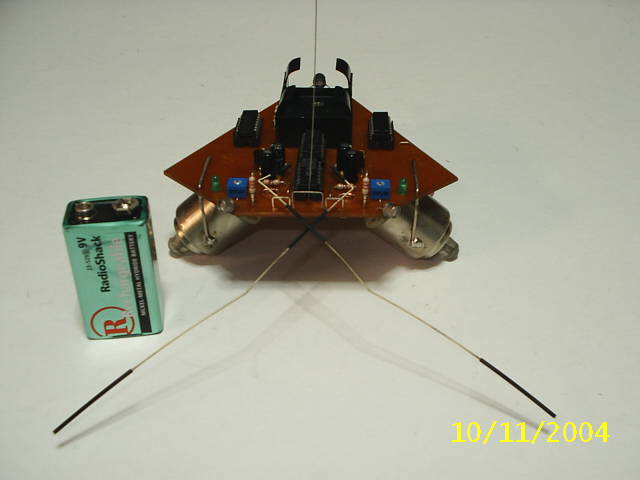
"Swift"
(click to enlarge)







--- Video Clips ---
Smarty got hungry (low in voltage - hungry mode) and went to its feeding station for a good charge. 4.10MB - Did you see the "steel rod" sweep? That makes Smarty stop! The small red LED indicates a perfect contact between the battery charger and Smarty's battery.
Swift got hungry too (low in voltage - hungry mode) and goes towards the bright light and backs-up a little. Thanks for his tactile sensors, or else...he might be electricuted! 3.93MB - This bot might need a large feeding station because of its quick movements.
.......more videos to come eventually!
Swift is also a cybug, that moves fast (hyper), just like a house-fly. Its circuitry is almost the same as Smarty. Smarty uses 2 independent IC's which is the LM555 chip as the brain.While Swift uses 1 chip for the brain and that is the LM556, a dual 555 chip (2 in 1). Both of these bots have the "hunger instinct" circuitry. So, both will attract and avoid light, depending on their modes. And those are: Phototropic Mode and Photophobic Mode. The current level of their battery is the reason why they change modes. If their battery gets lower than 6 volts, they become phototropic, but if it is more than 6 or 8 volts (9 volts actually) at least, they are photophobic. You can actually adjust the voltage detection by adjusting the 2 trimpots in the "hunger instinct" circuitry. Or, you can replace those trimpots with the right resistor values (fixed). Cybugs are really designed to be photophobic.
Now, back to Smarty...
When you look at Smarty, it is like a mini sumo or a sumovore, right? I like the way it looks, round shape and acts like a lady bug. This bot lights up a green light (dual-color LED), indicating that he's hungry, and goes towards the brightest source of light that is mounted in its feeding station and stops there automatically for several minutes for charging. But when he's full (batteries are charged enough), a red light indicates and starts to get away from the light (in his feeding station). In fact, you can alter the colors of the dual-color LED, like green to red or red to green), whichever you prefer, it doesn't matter. These behaviors are well-known as "phototropic" (going to the light) and "photophobic" (avoids light).
I've designed its feeding station and took me a month, planning and building it. Although, it's not yet placed in a casing, but man...it's very efficient. It was made of some relay timer circuits, including an ultrasonic switching circuit. The steps are the following:
These behaviors are much like any other insects does. And this kind of machine is considered to be a BEAM bot that's related to BEAM community.
Some of the "switching activation" process (which I didn't include) in Smarty's feeding station is kinda hard to explain. Some of us does that too, right? I'm sorry for that, but I'll try my best to explain it later. But for now, just enjoy watching the videos and some pics.
Any comments or questions are welcome, just let me know and I'll try to answer it as much as I can. Keep soldering guys! And thanks! ;-)
...more to come eventually!
...continuation on explanation about the feeding station.
Ok, well... the "ultrasonic proximity sensor" has also a timer circuit. This timer circuit allows and activates the said sensor (ultrasonic sensor circuitry) to turn it ON... more than the time given in the other timer circuits for the battery charger. This way, the bot can still or will have the time to escape in the feeding station when its battery is full (photophobic mode) and after the "steel rod" sweeps away and gets back to its normal position, which switches the bot's antenna switch that makes it active again. Whew! So, the ultrasonic sensor is still in the pause or "on hold" mode, eventhough the bot comes near or activate the sensor...the ultrasonic sensor will still be disabled for a minute or two because it has its own ON/OFF timer. So, the bot should get away with it as quick as possible before the ultrasonic sensor's timer has ended and begins to detect any object that comes near to it again. But if the bot is still stuck in the detection area, and the timer of the ultrasonic sensor has ended, the said sensor will begin/resume its detection again. And when the bot has been detected, the "steel rod" from the charger/timer circuitry will sweep again, knowing that another bot needs a battery charging. Get it? Hehehe...that would be all for now! ;-)
I just hope you got my point. Enjoy BEAMing! Later guys!
You can E-mail me with your questions and comments anytime!

Copyright © 2004 by Harold R. Ilano. All Rights Reserved.
BEAM Patents by Mark W. Tilden.
Cybug Robots by Craig Maynard.
Visitors
since October 11, 2004
Hit Counter