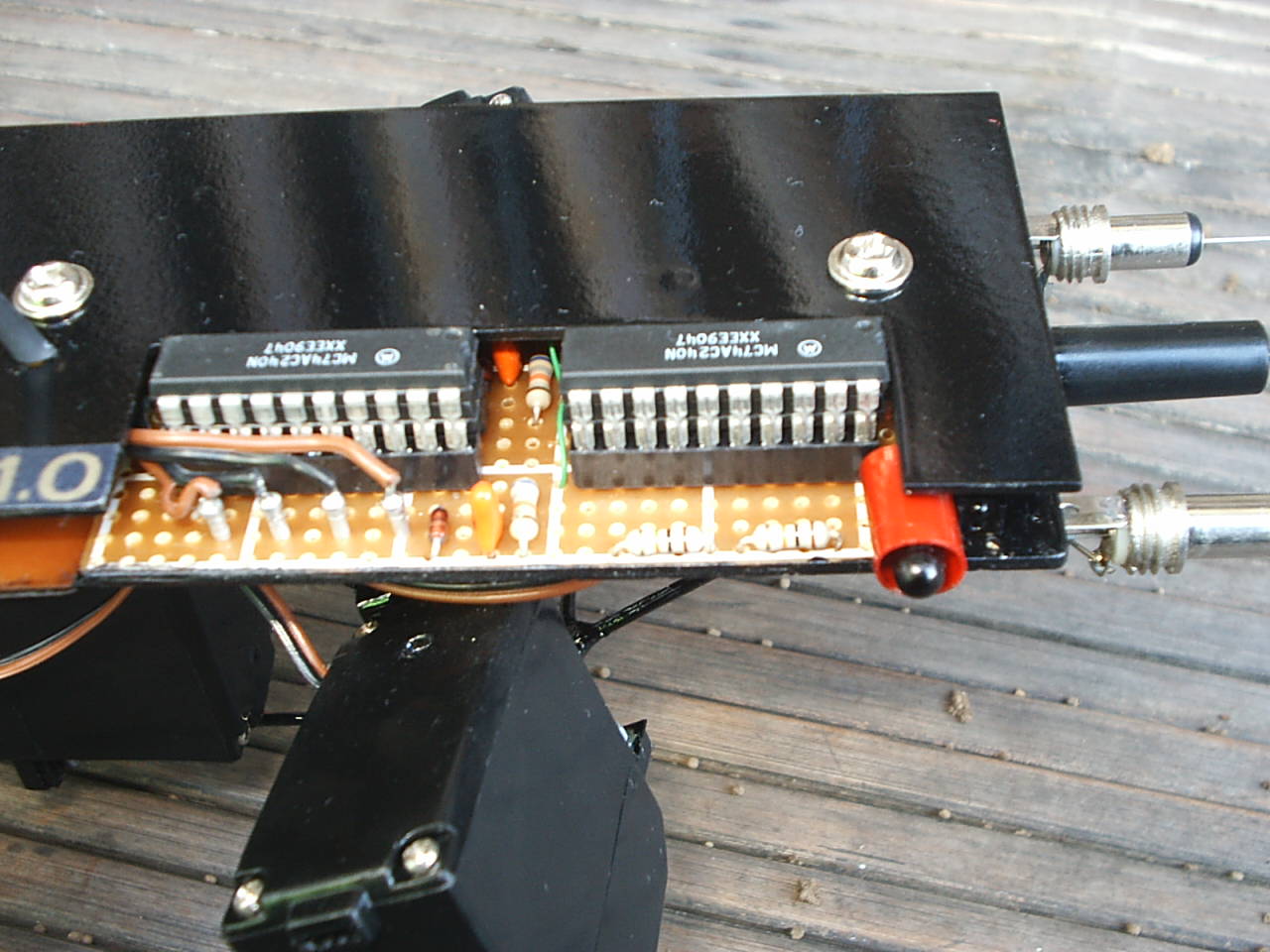
"Bull Walker 1.0"
Introduction:
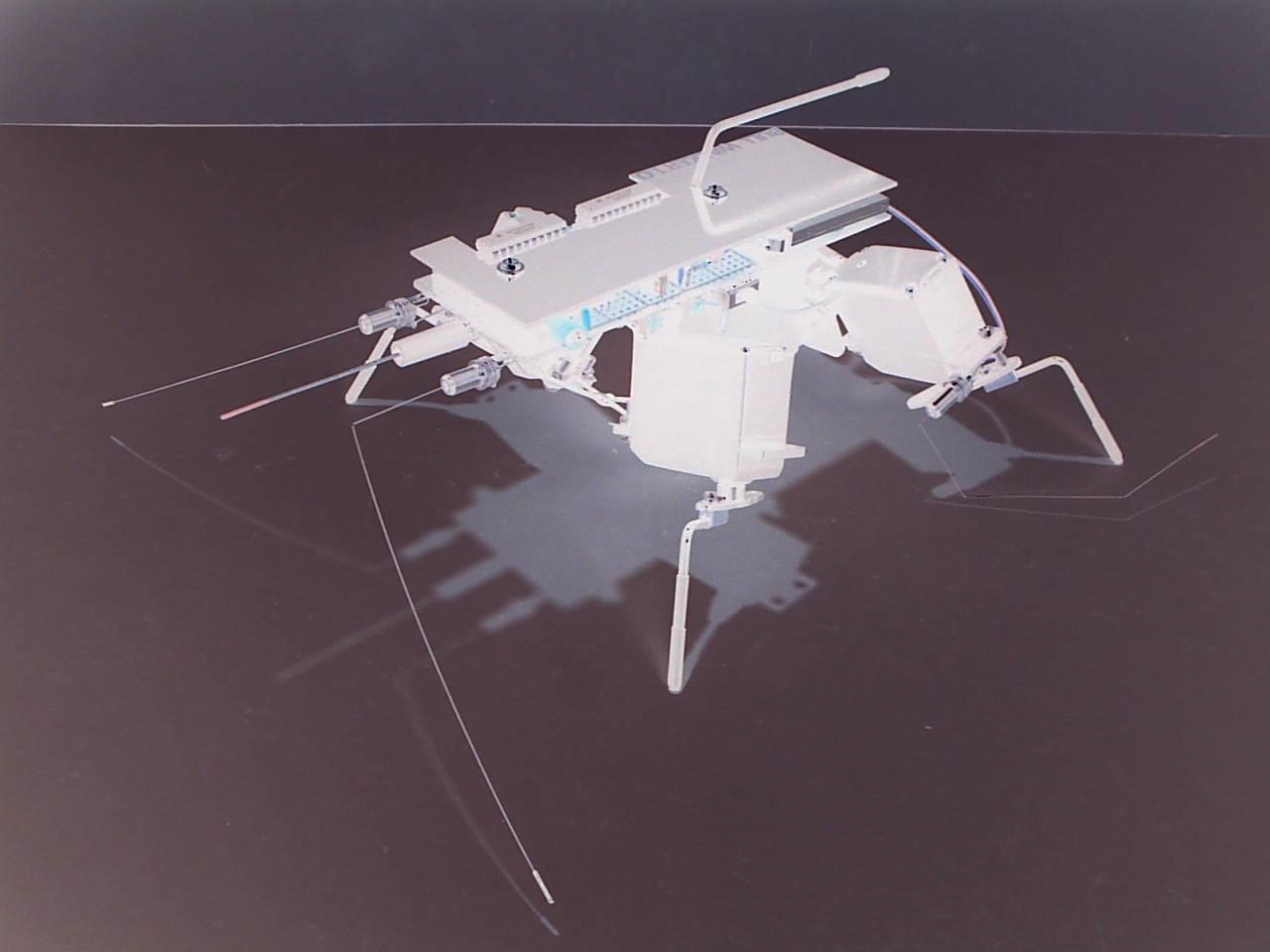
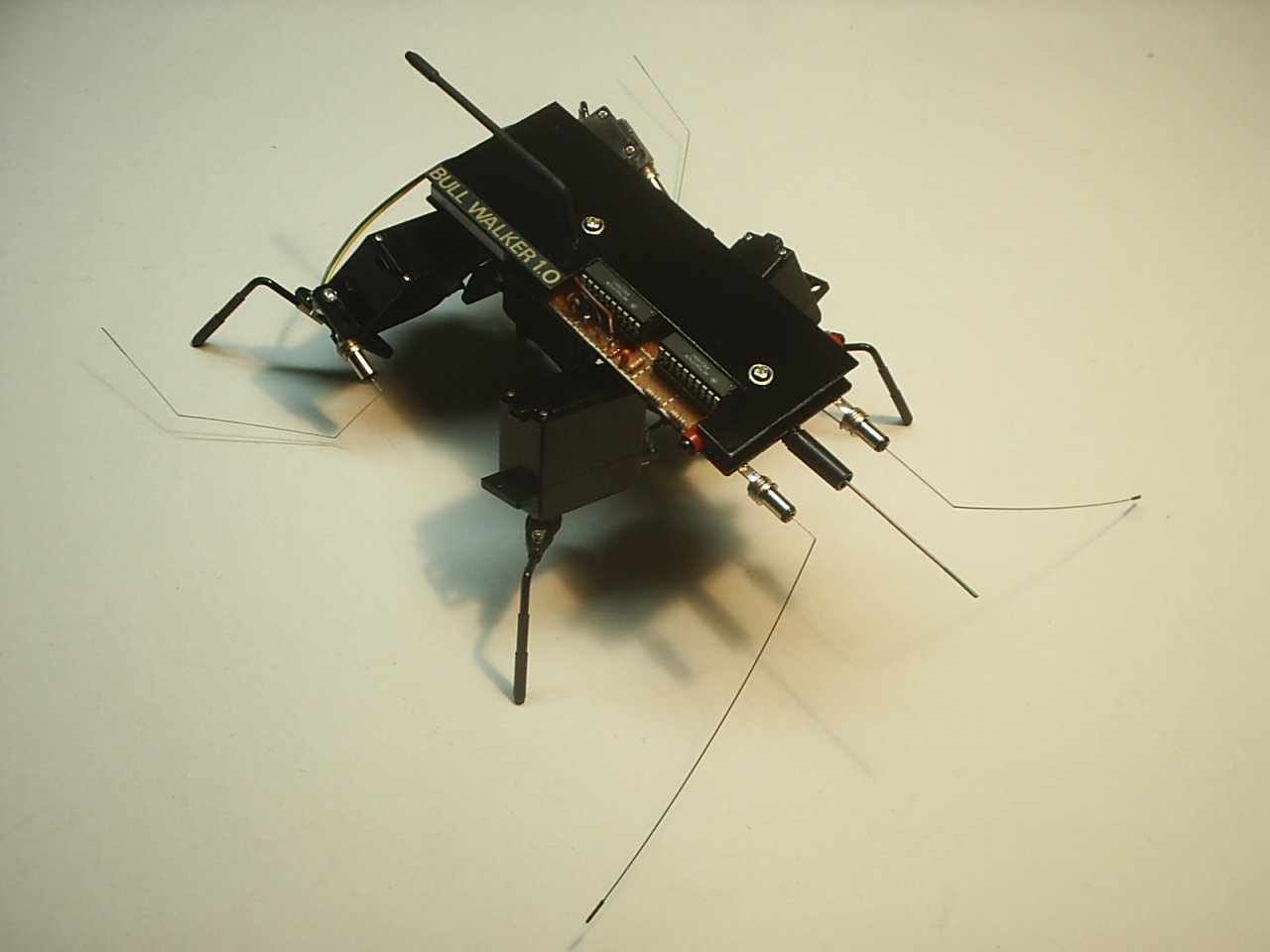
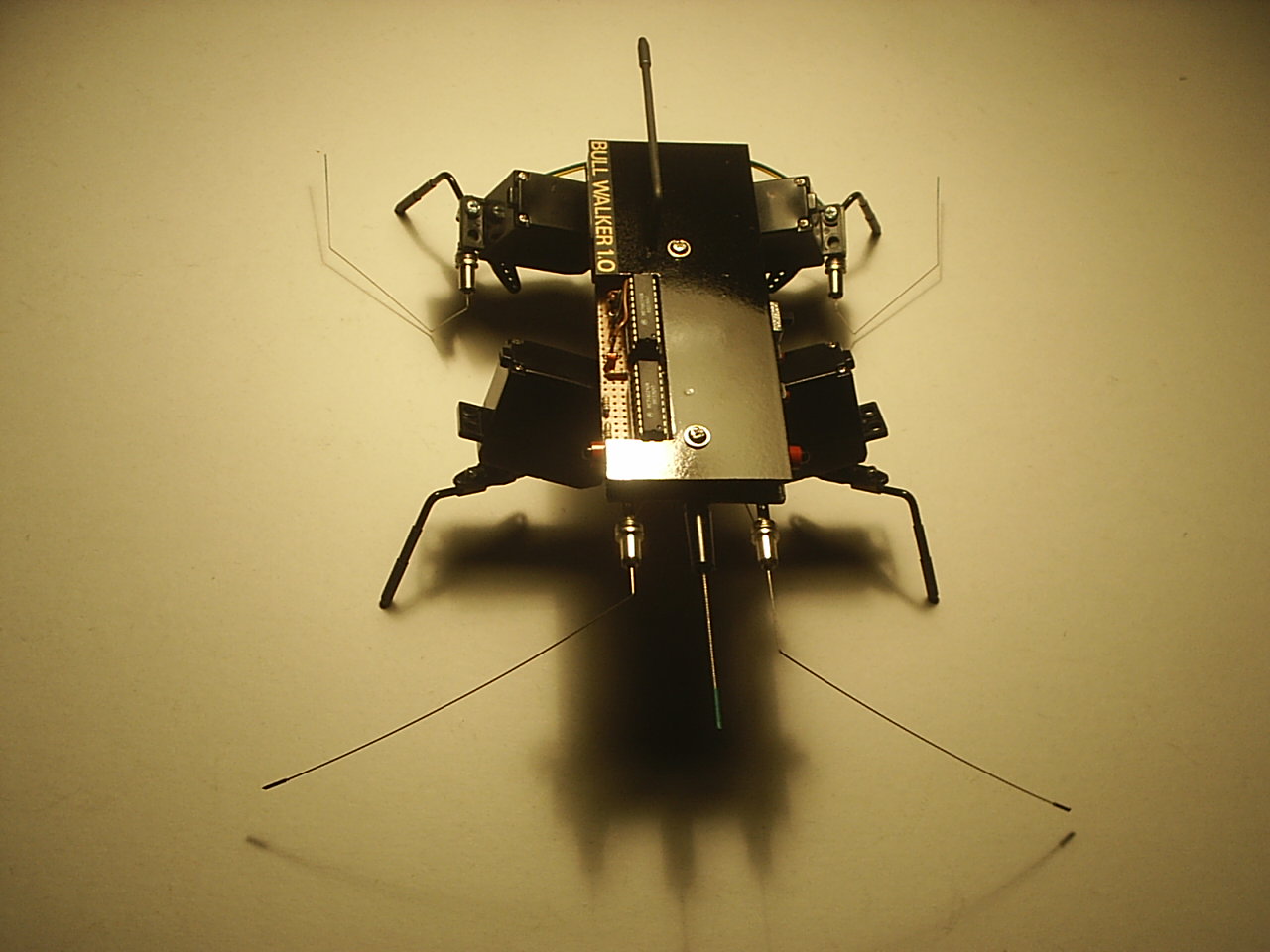
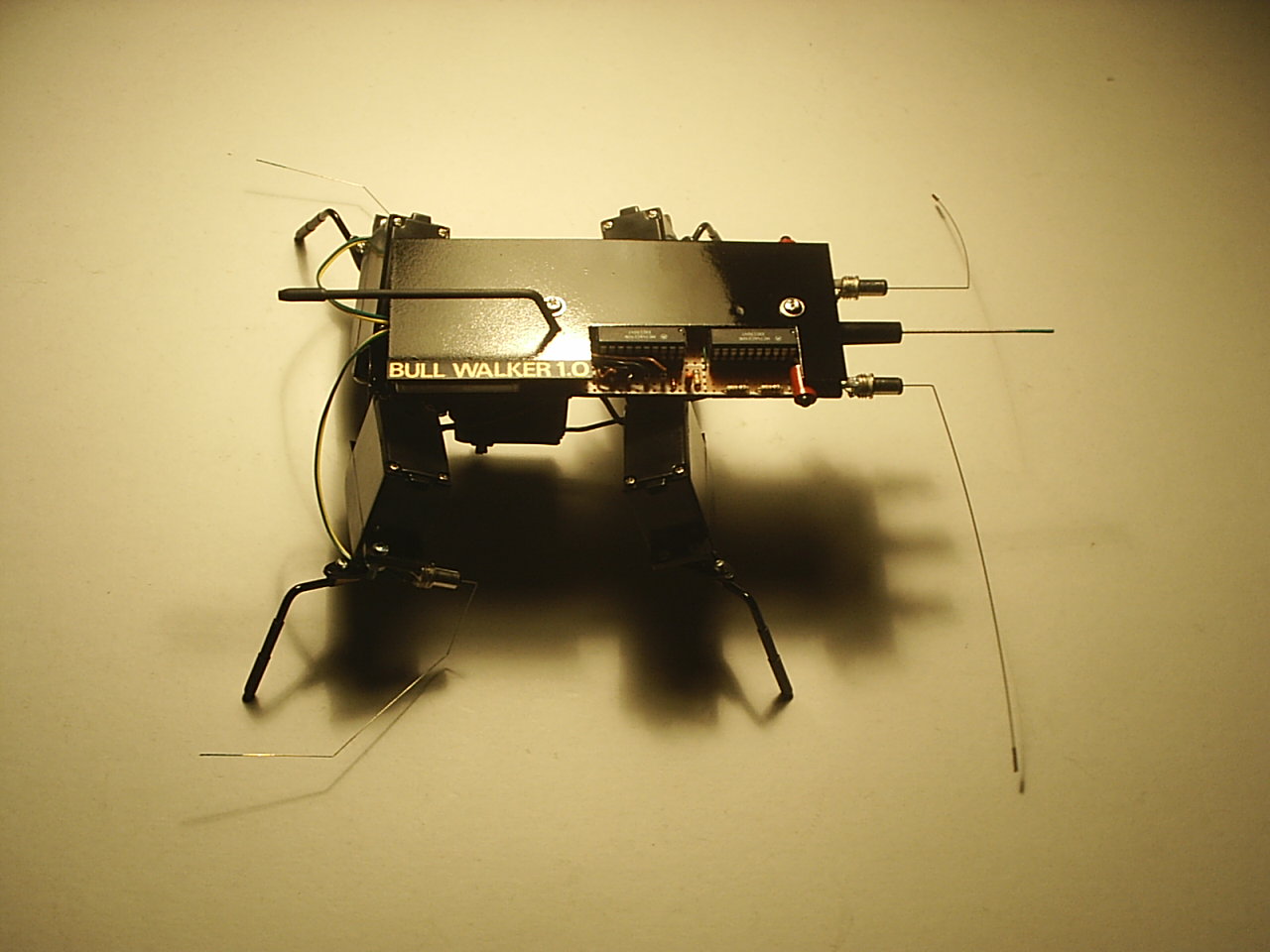
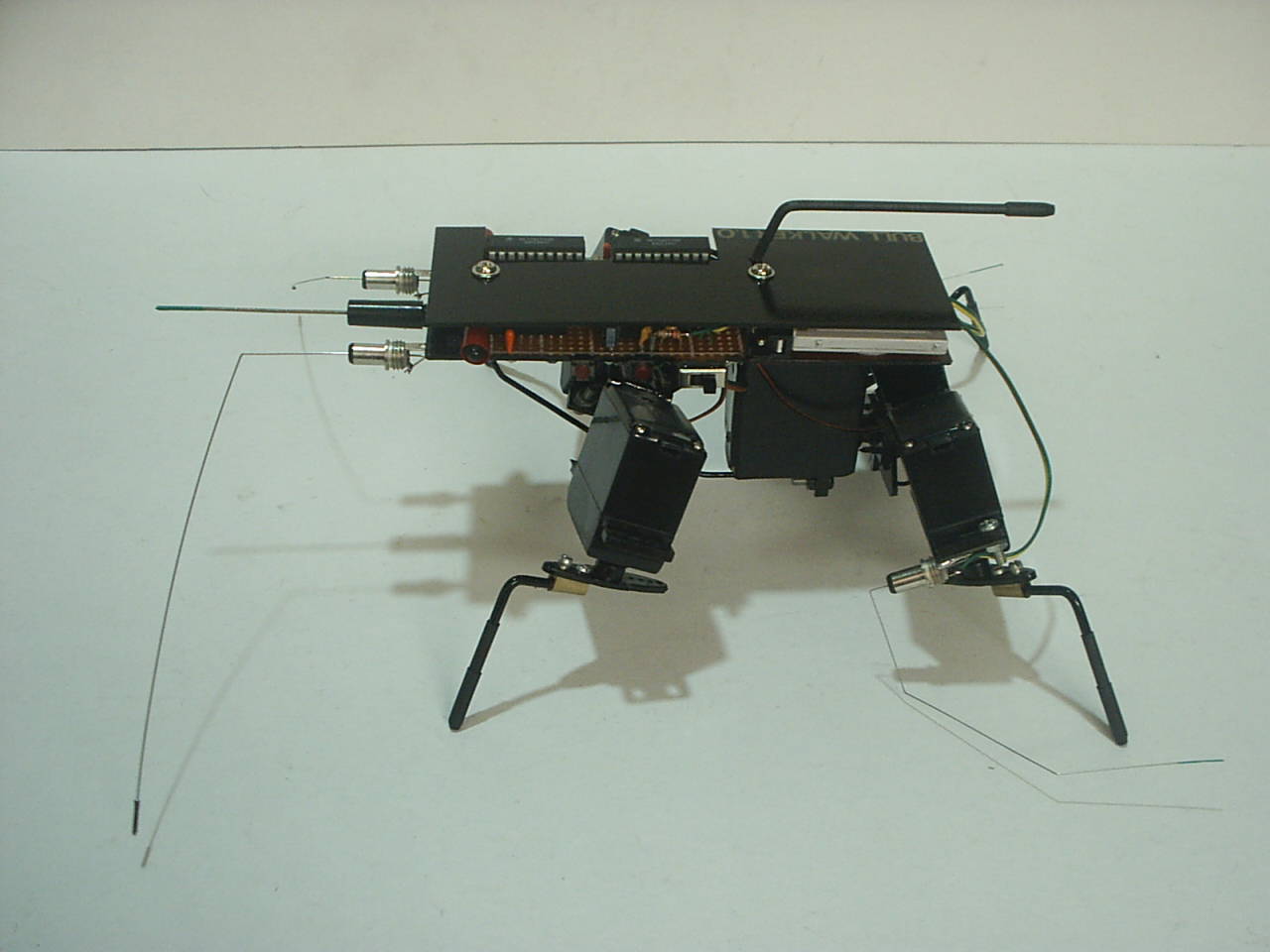
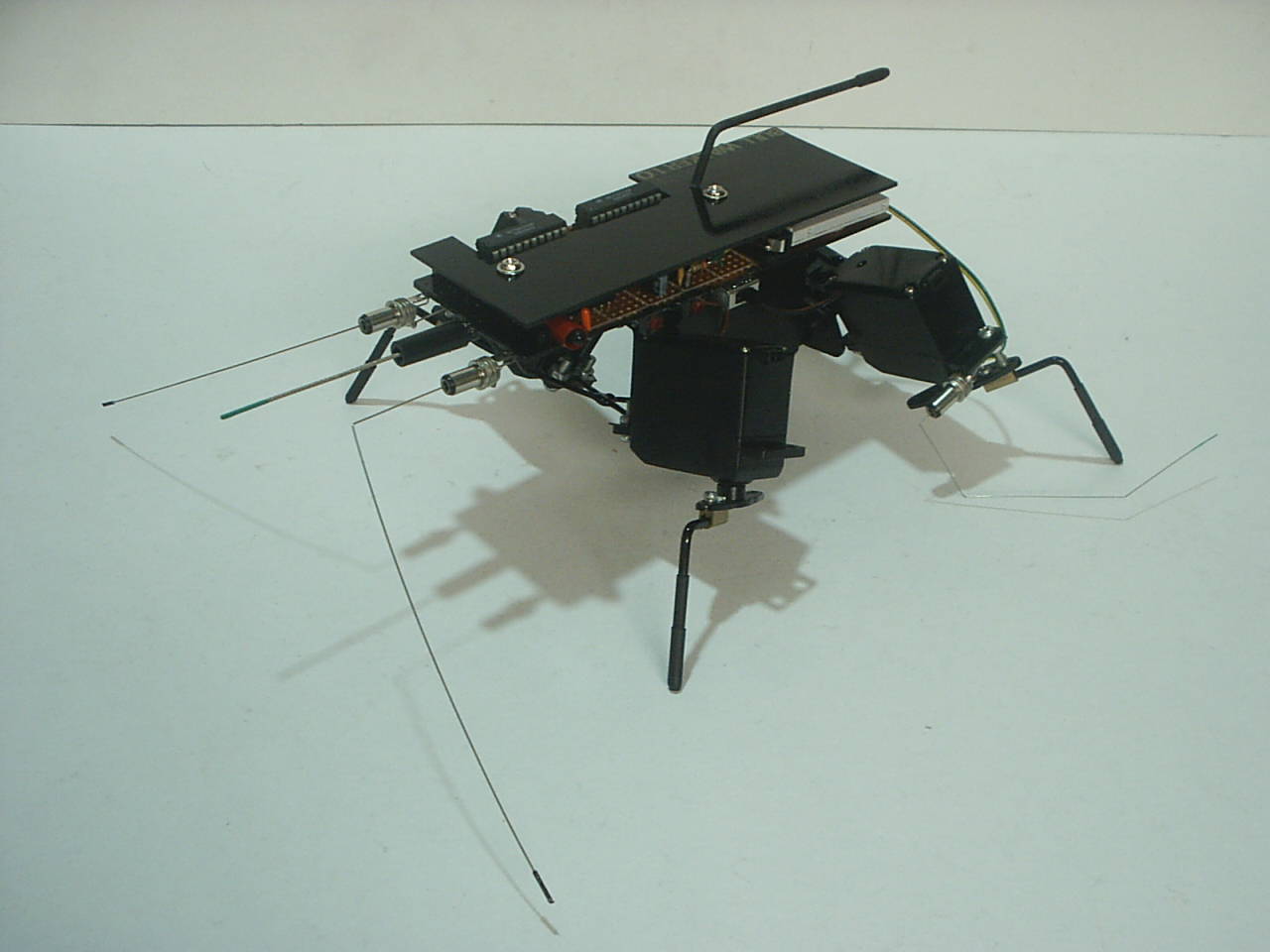
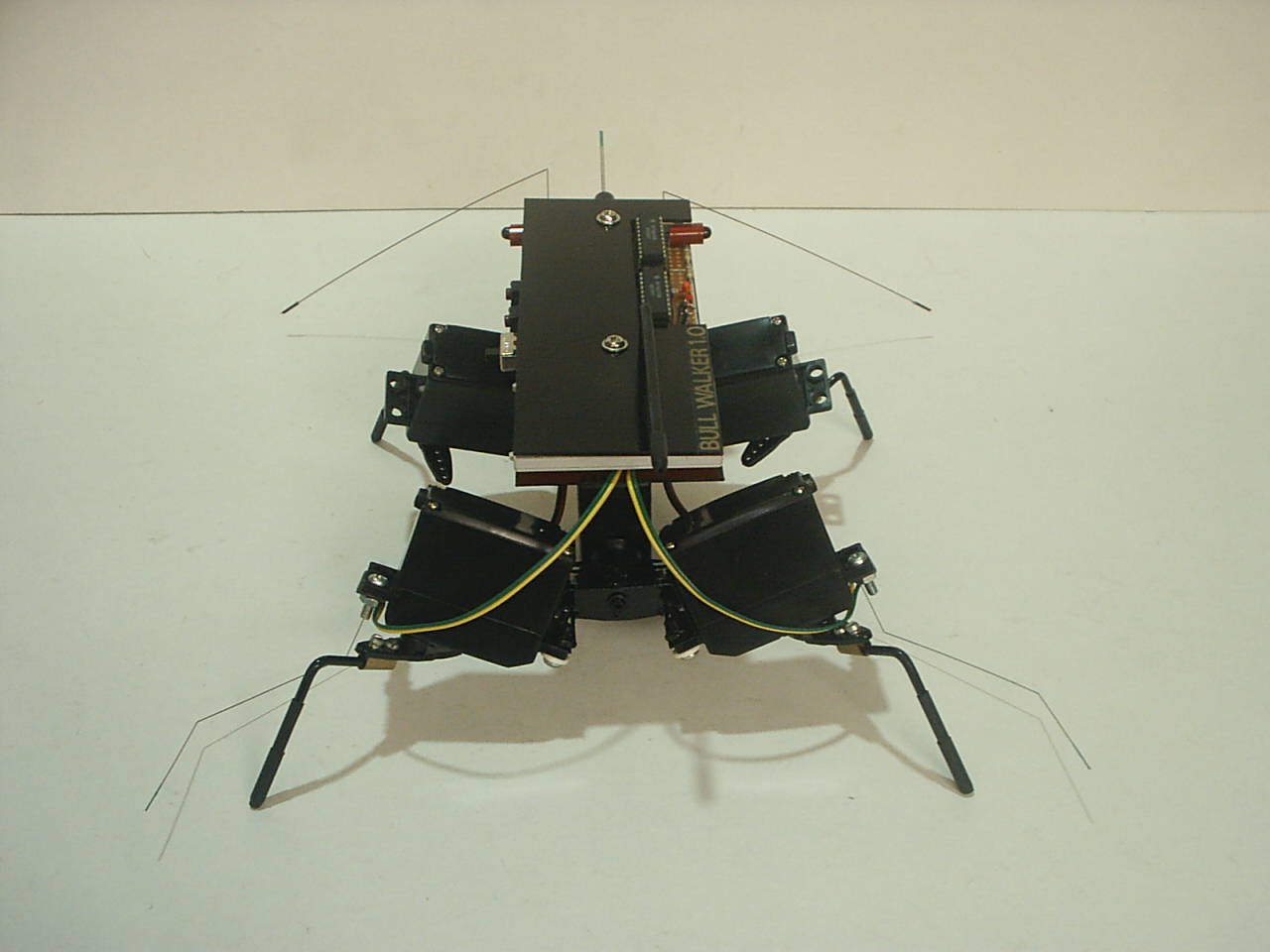
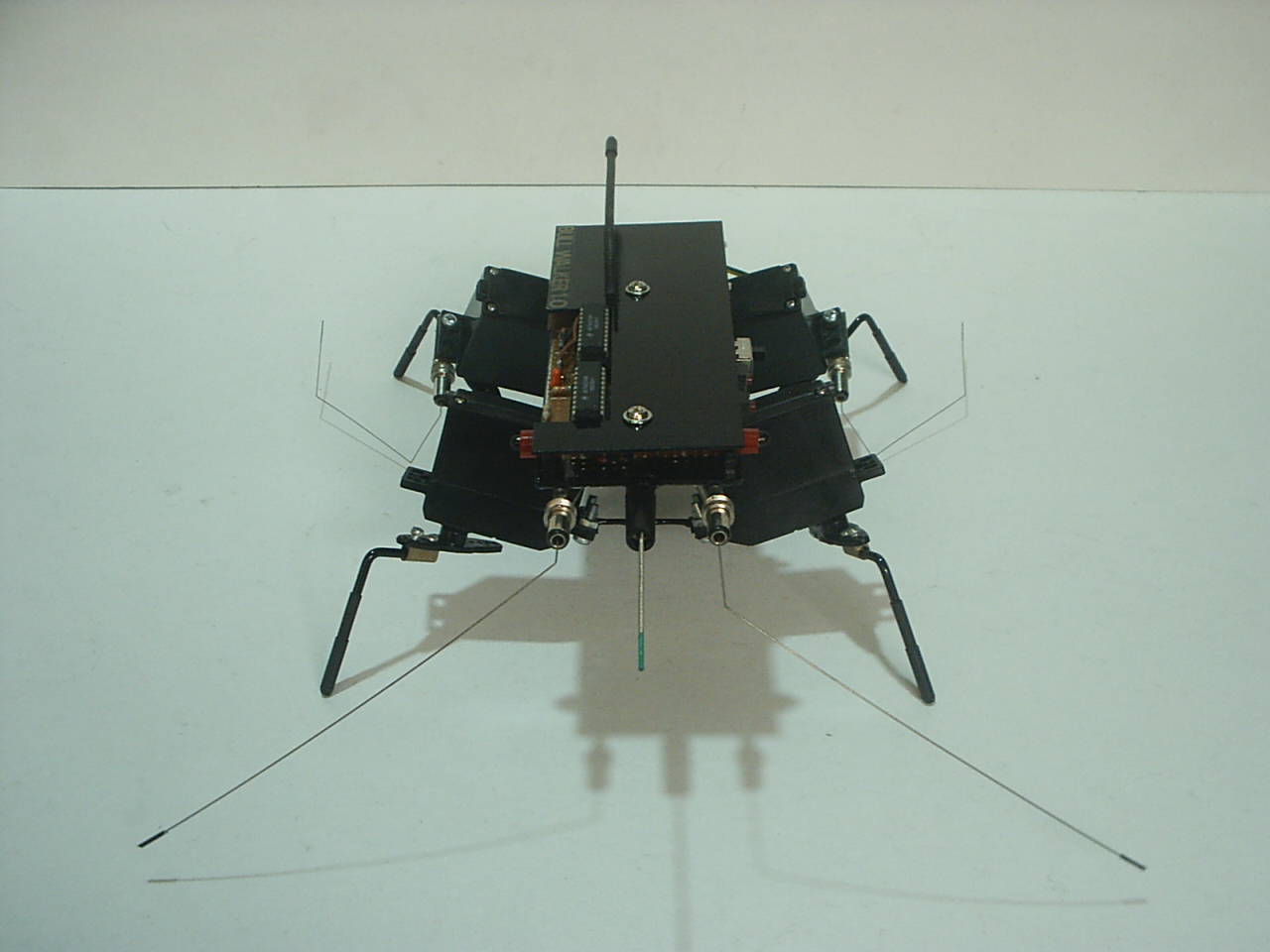
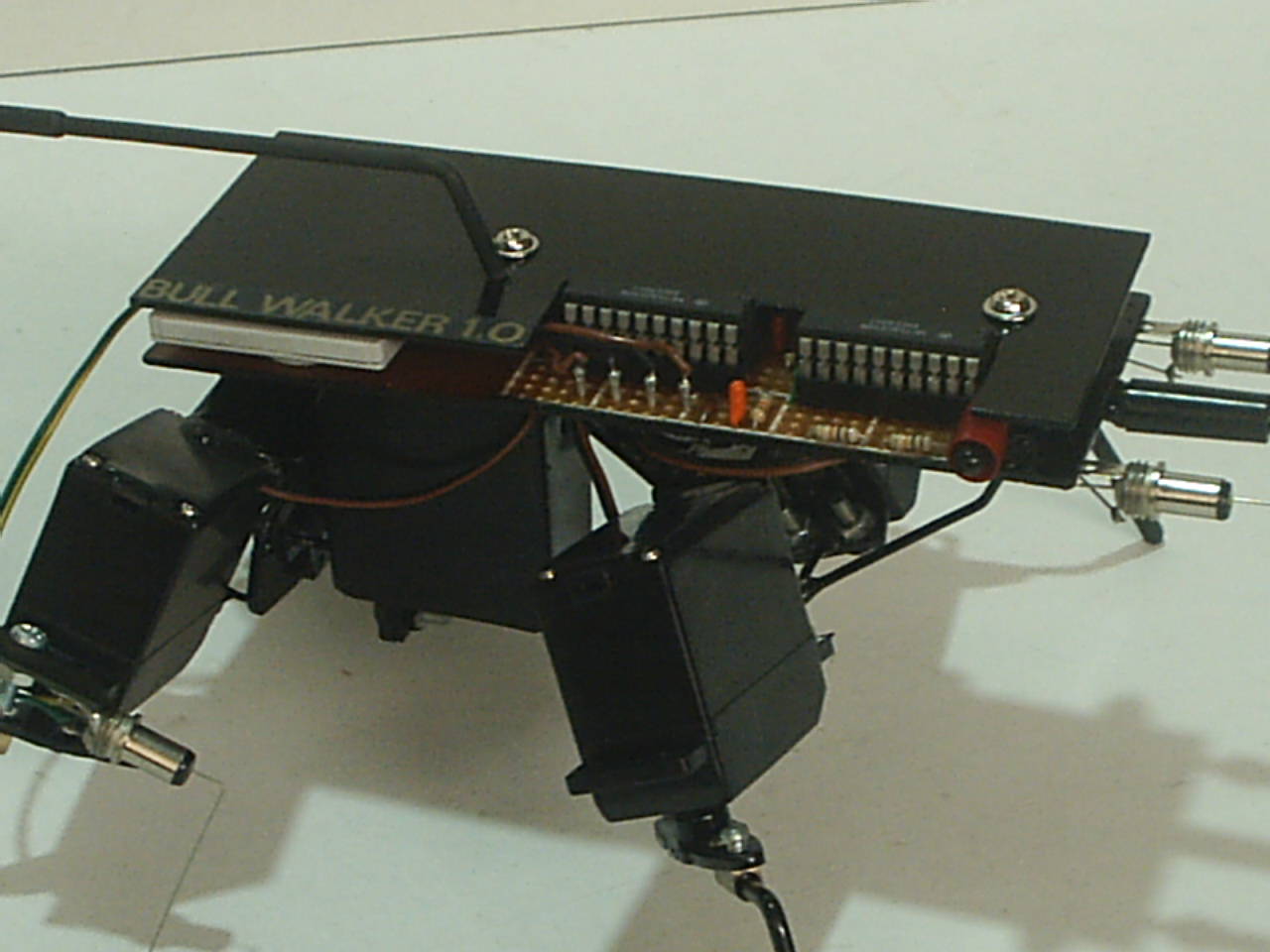
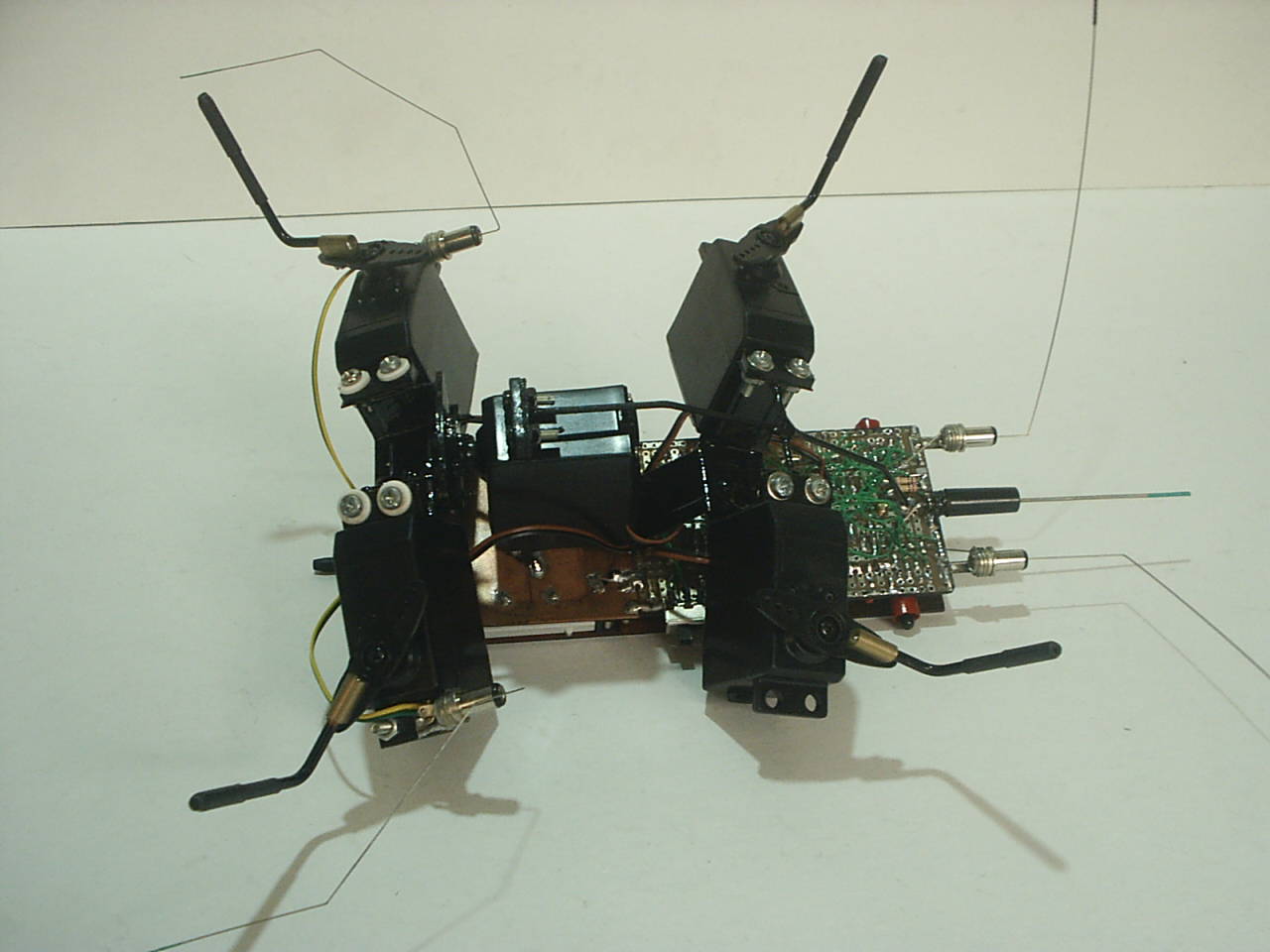
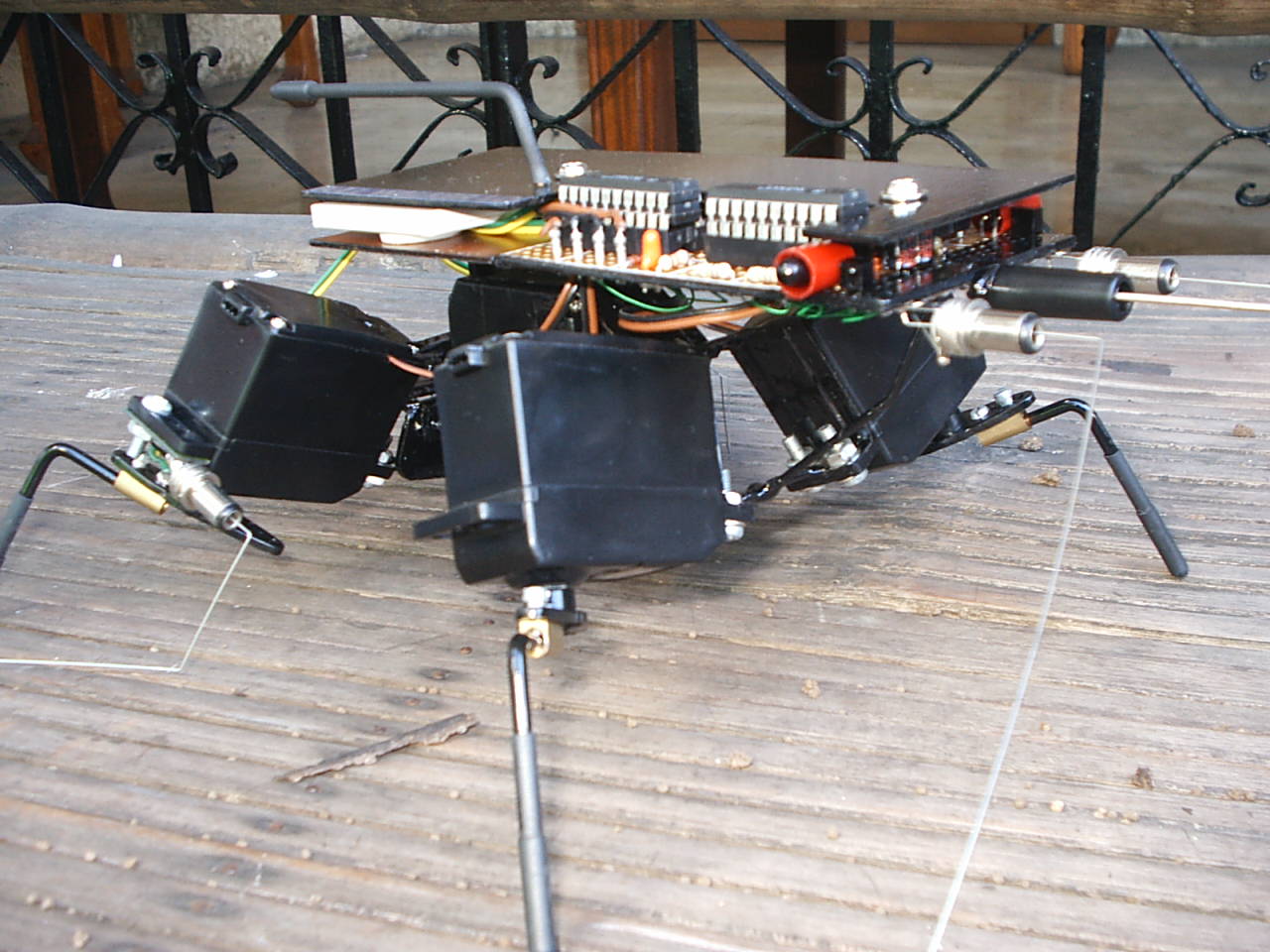
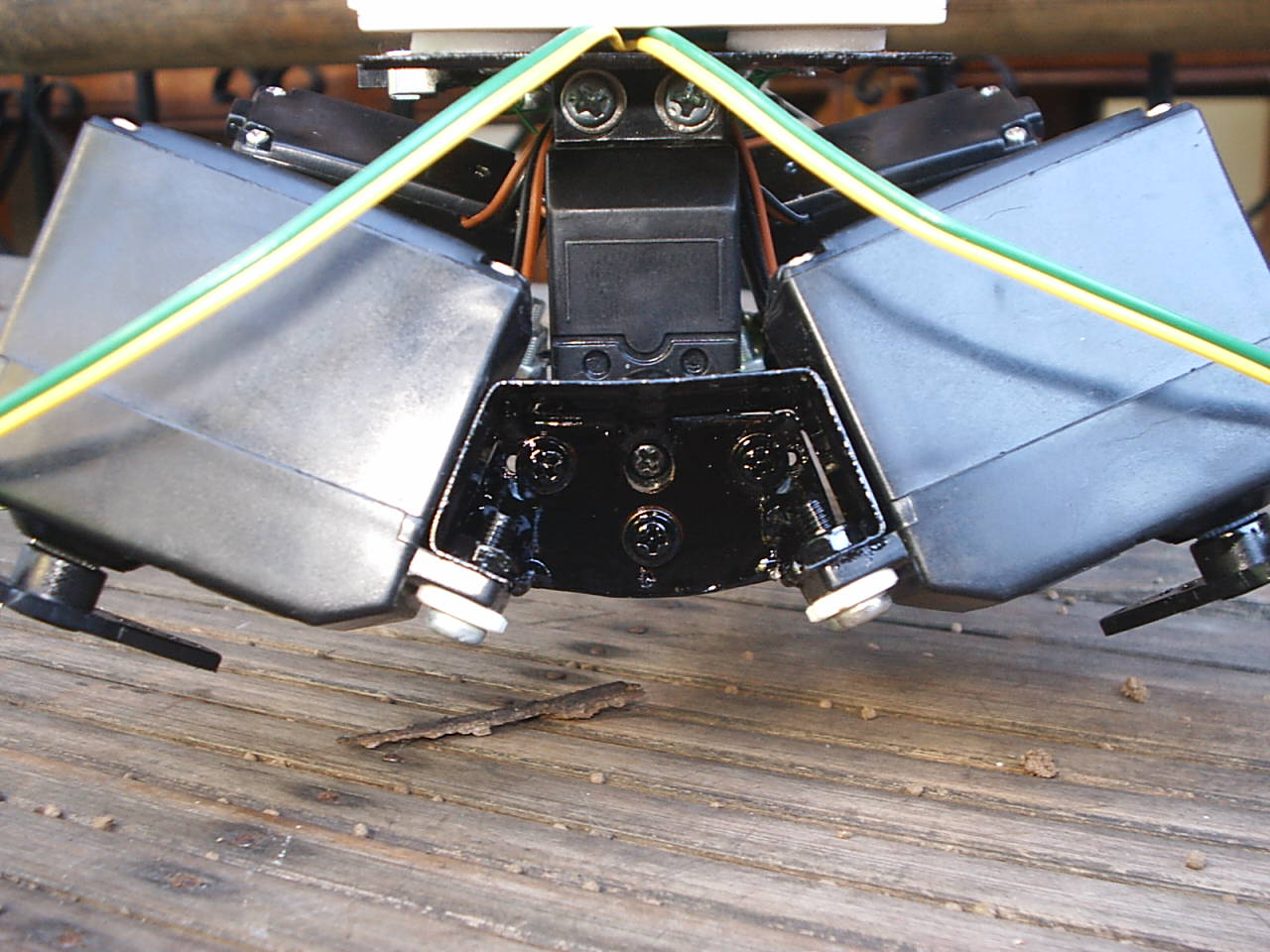
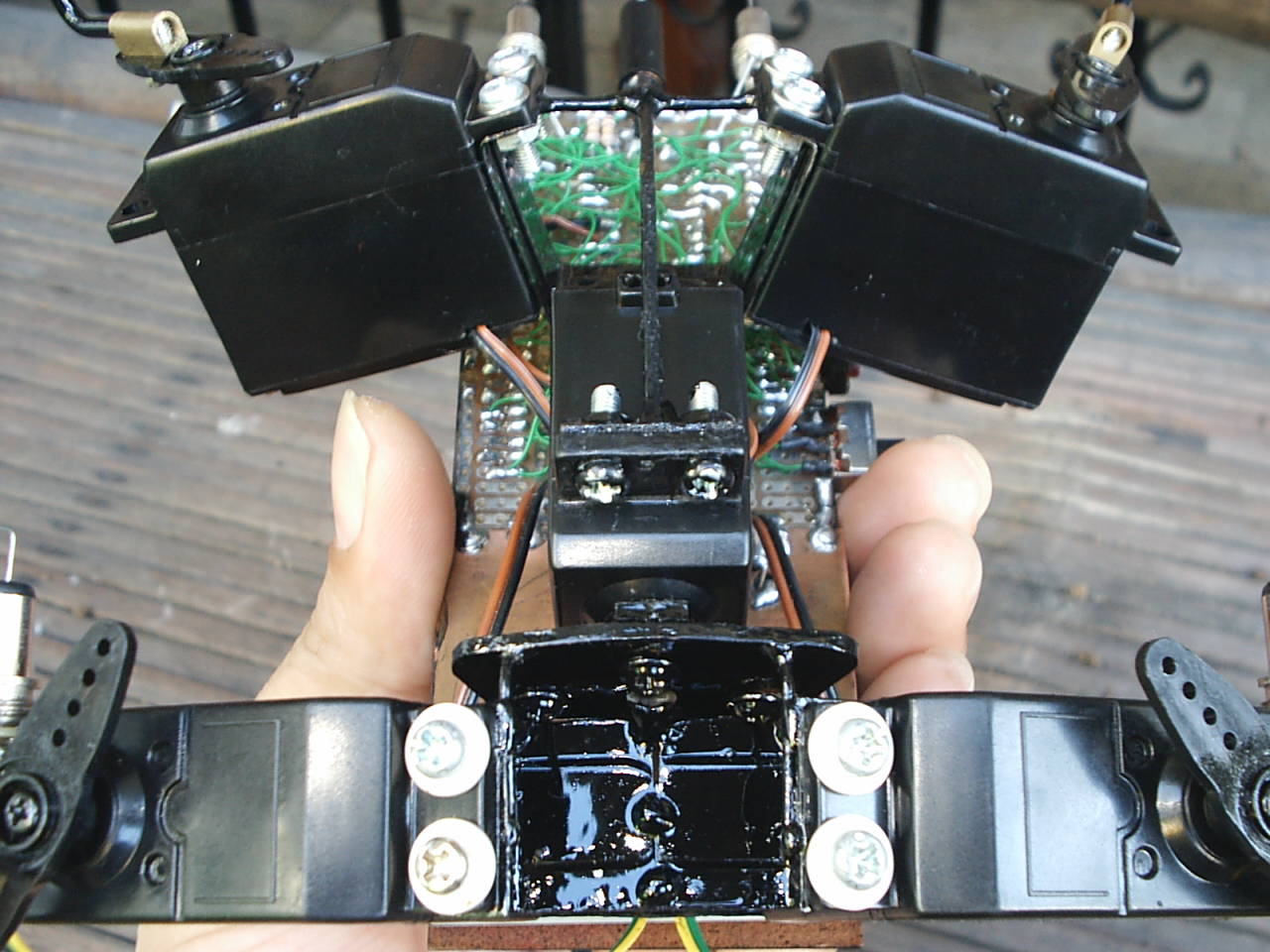
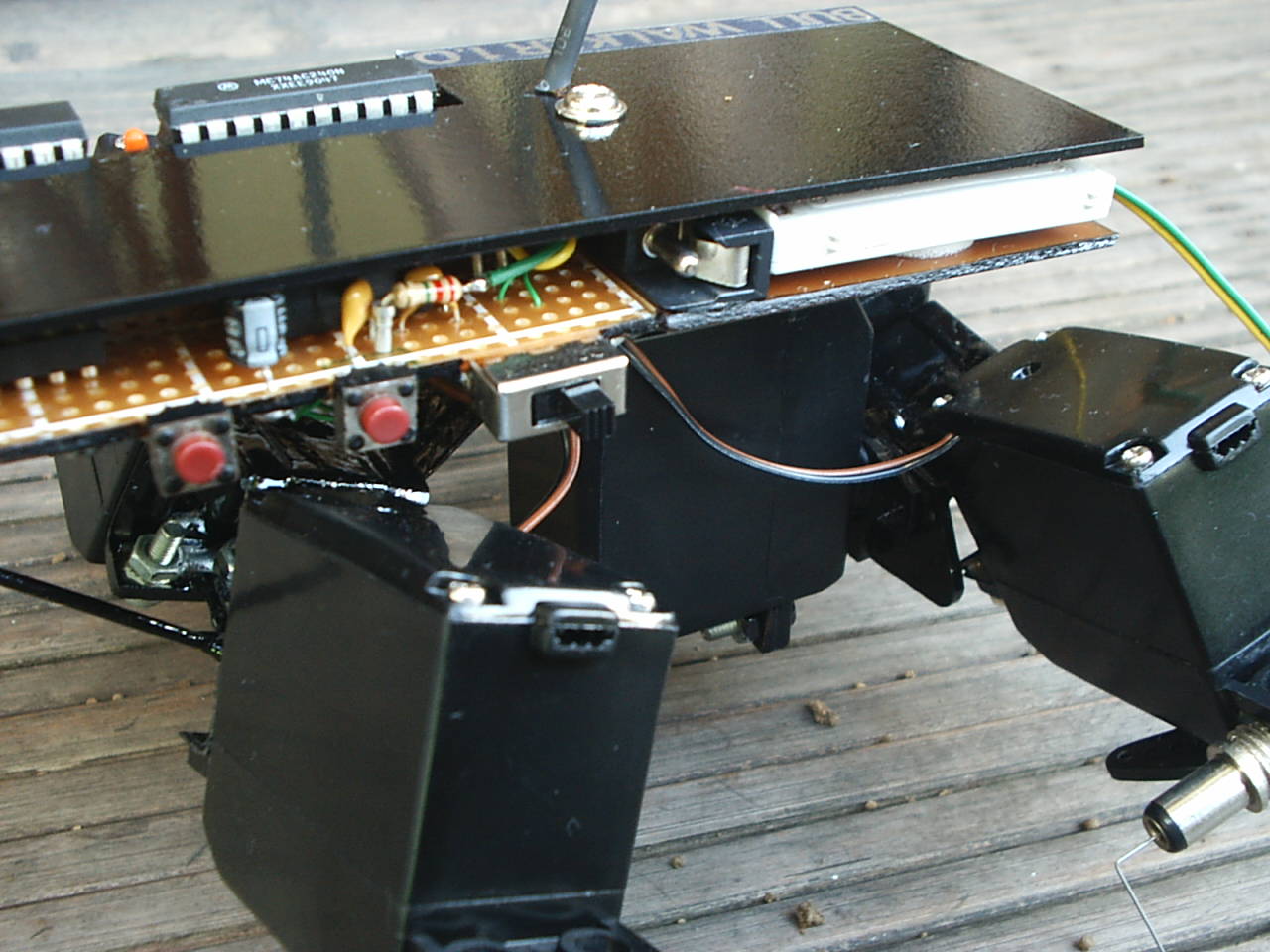
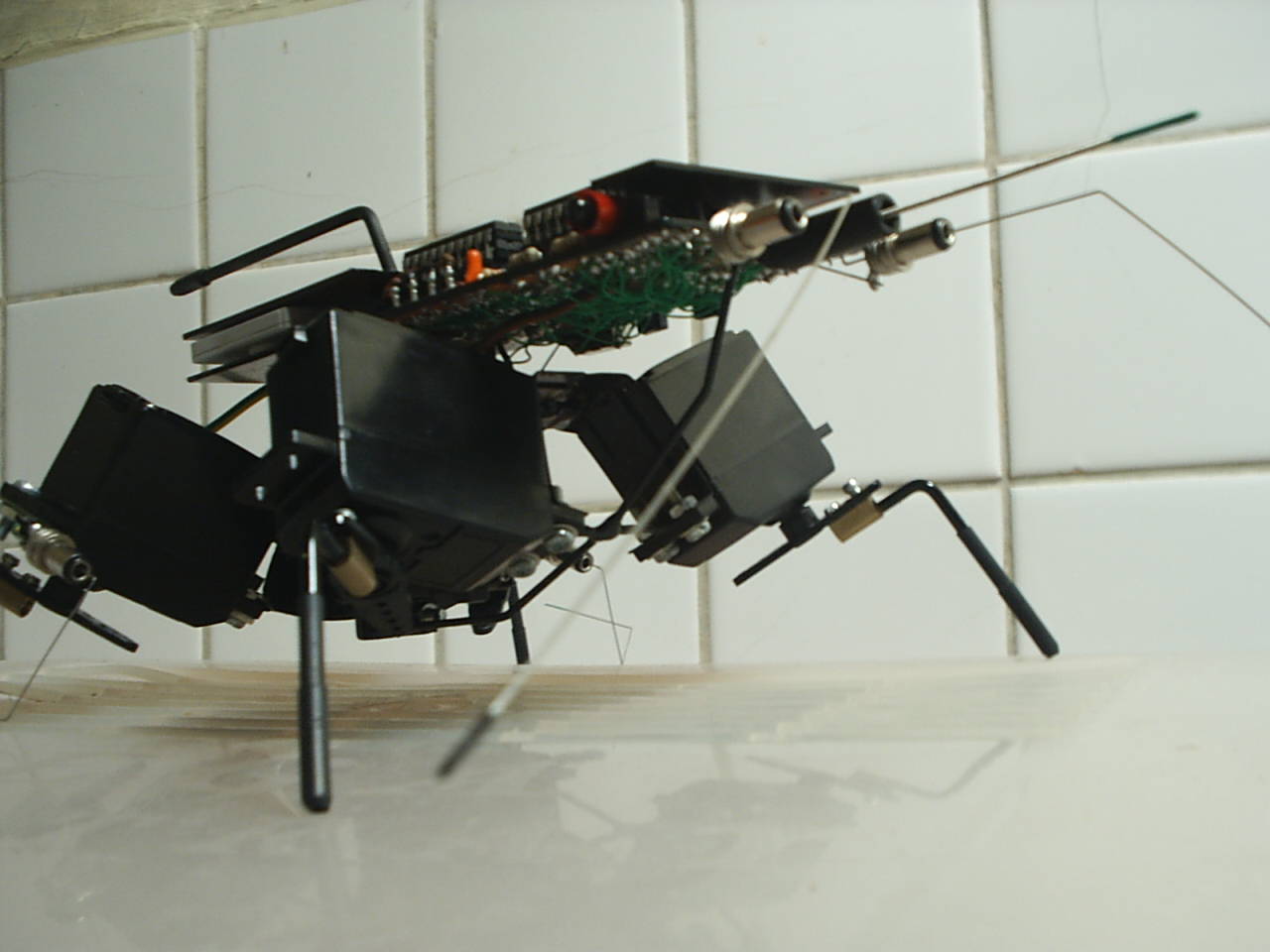
This is my second attempt in making a 5-motor walker. It is based on Mark Tilden's amazing VBug Walkman. This bot is driven by 5 standard hobby servos and was modified/hacked. The only thing was, I didn't remove the end-stops inside the main gear shaft. This will serve as a mechanical stop, so each leg of the bot won't rotate too much when walking, etc. I recommend not to take this off. This is very useful for most walkers. Just remove only the electronics inside the unmodified hobby servo and that's it! You'll just adjust the right rotation of the legs according to your desire, and screw the servo arm when you're contented with the leg swing. Get it? I hope.
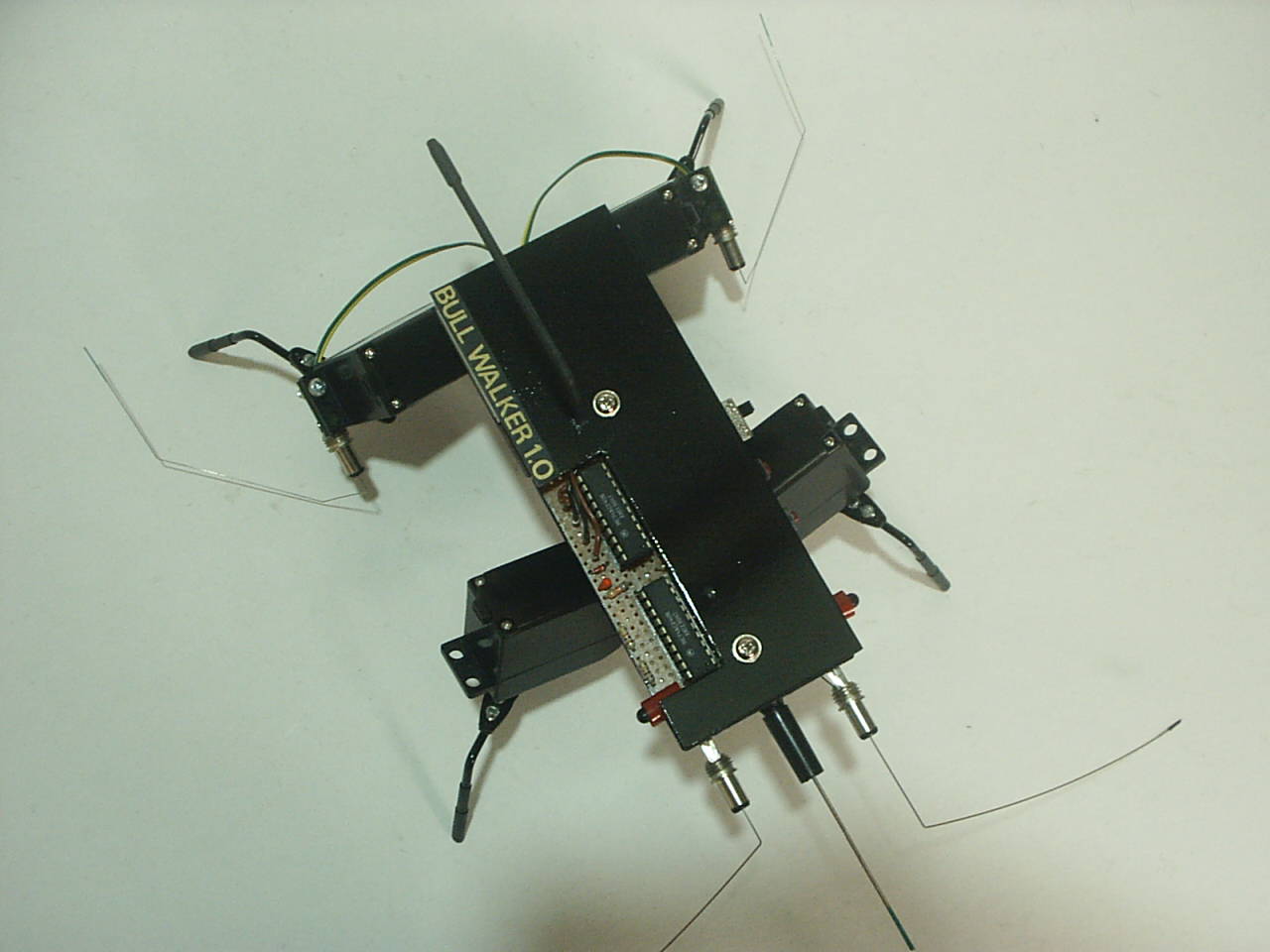
Anyways, this bot is almost identical to Black Vermin's (if you could remember it) behavior. It also performs all of Walkman's capabilities. But I disregarded the "crabwalking" thing. Instead, I just use the other sensor (see the original schematic of Walkman near the photodiode/phototropic sensor) to make it turn left or right located in the front (LSD/RSD). This bot also backs-up or reverses when the front center tactile is hit. It also uses its phototaxis feature. Like Walkman, it uses its ultra-bright LED's when backing-up, and when it's close to any obstruction (while still reversing), that red beam of light reflects on it and bounces back to the photo sensor of Walkman that makes it turn away from that corner or obstacle. Clever isn't it? The same thing goes to Bull Walker, instead, it uses high-output infrared LED's (which is also a very effective method). Just watch its video clips later on. What else, ammmmm.... oh yeah, this bot has also back/rear sensors and is used to lift the rear legs higher than its normal lifting (depending which rear leg is caught or which tactile is hit) to get out of a certain stuck situation or even in a hole. And lastly, it's phototropic. By the way, this bot was carefully balanced, angled and aligned, to get the center of gravity. This way, each leg, center itself eventhough the legs goes in different angle (sensors were triggered). It will just return to it's normal leg angle and walks again perfectly. It took me more than a month I think, to make this bot. Another nice thing on this bot is, it uses just 3.6 volts Li-ion single battery pack which has 540mA (from a cellphone). This type of battery runs longer and has long-lasting power. I recommend using Li-ion or Ni-MH batteries instead of Ni-Cds. Check out its rear top that is white in color and rectangular. Yes, the small and thin one.
Well, that's all for the long intro (sorry) and let's go now to the pics section. Enjoy!
PICS
(click any pic to enlarge)


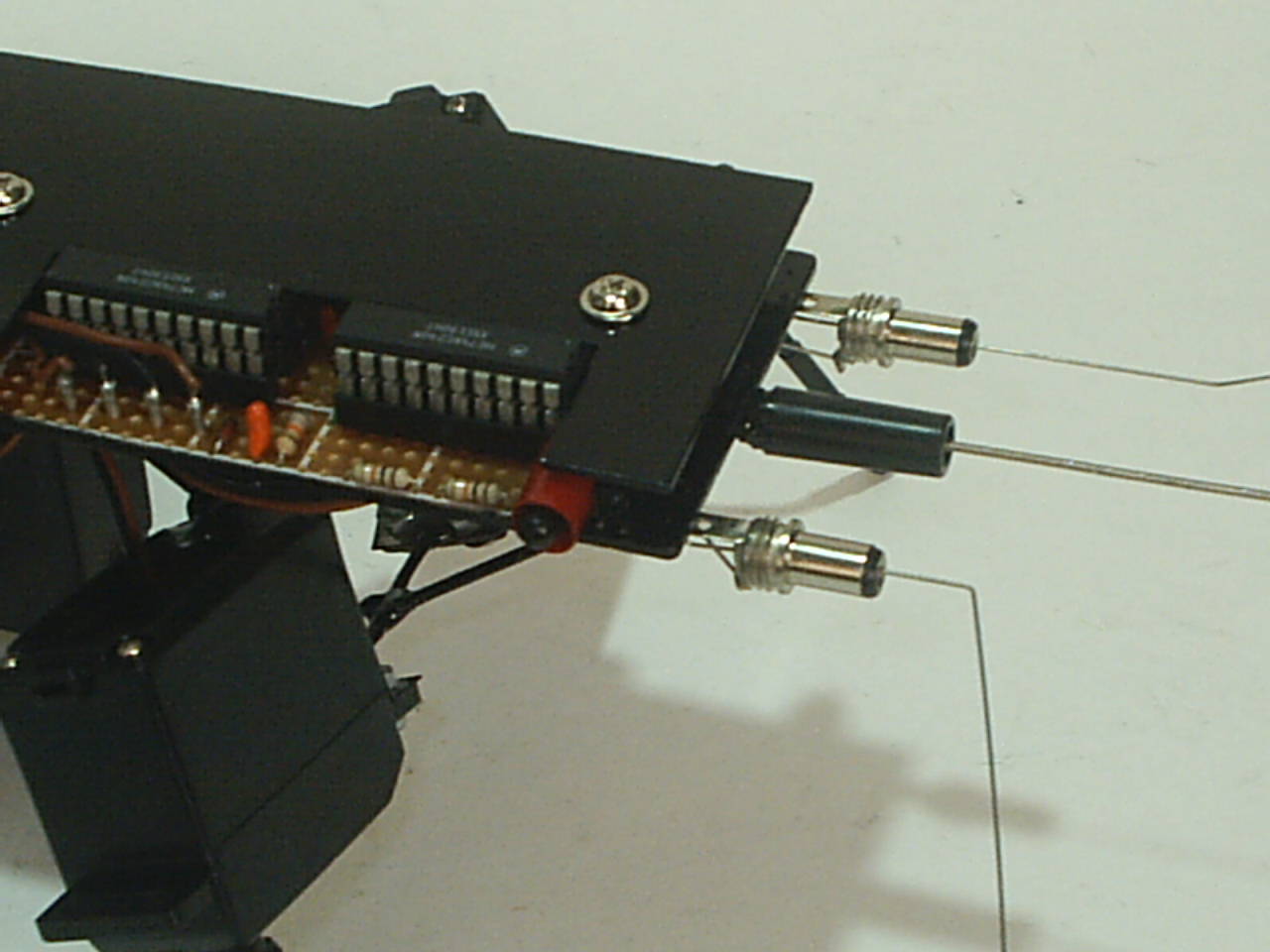







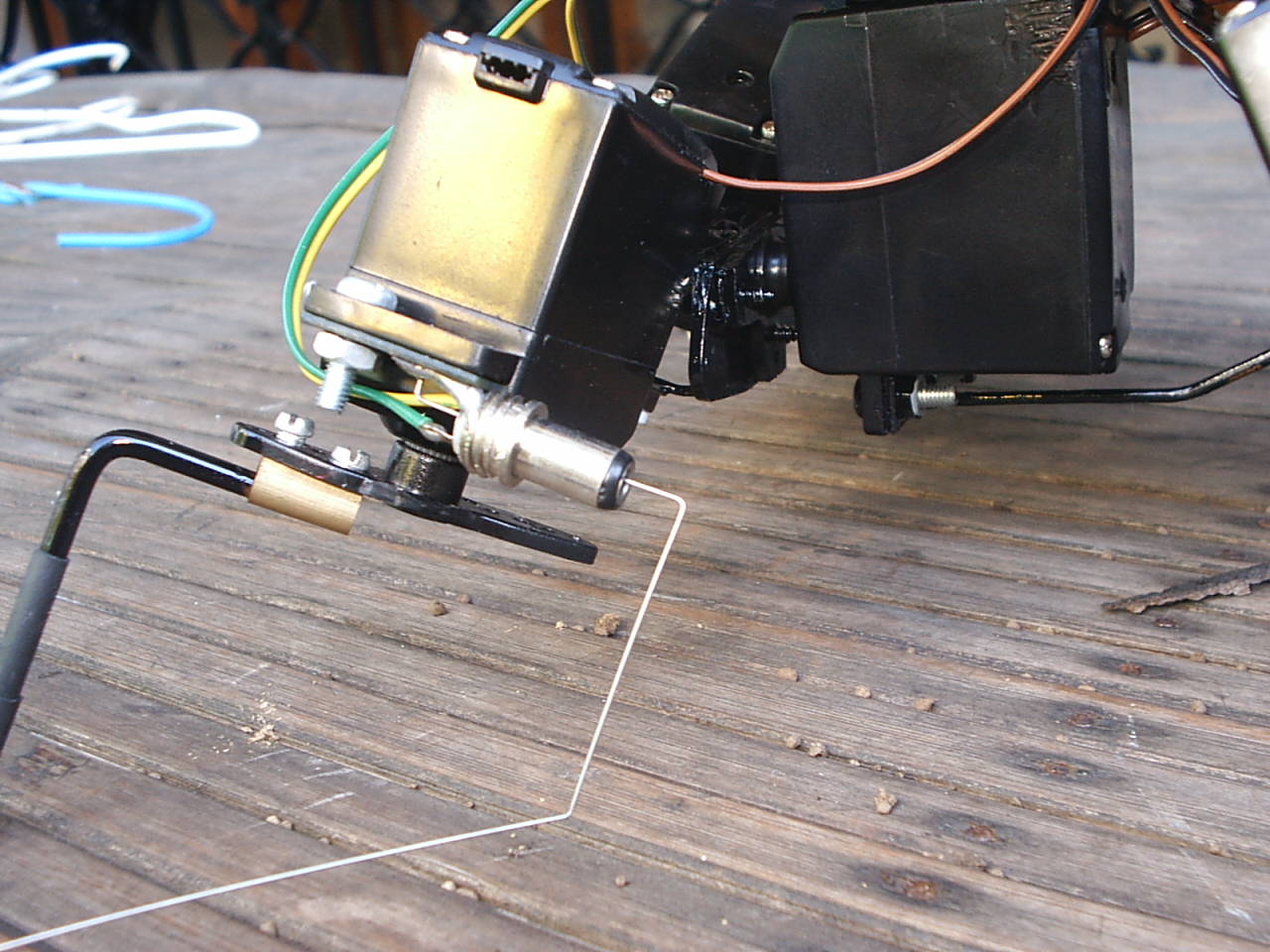





Some tips on my tactile design:
(click any pic to enlarge)
Materials:
-
Male jack adapter plug (barrel plug)
-
Guitar strings (size #1 to #3 - the lighter the better)


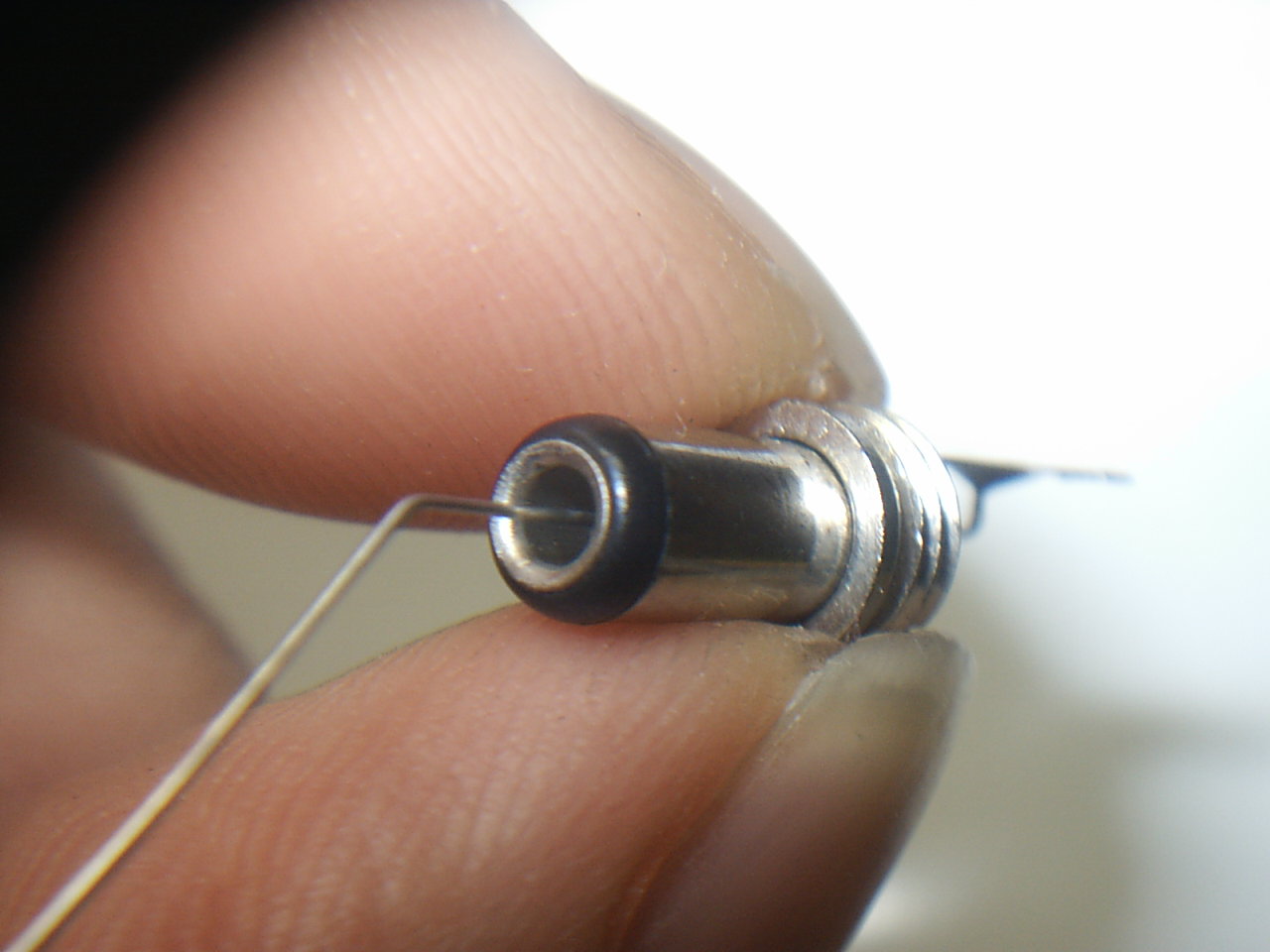

...solder very carefully!
Schematic Diagrams
(Based from the original by Mark Tilden)
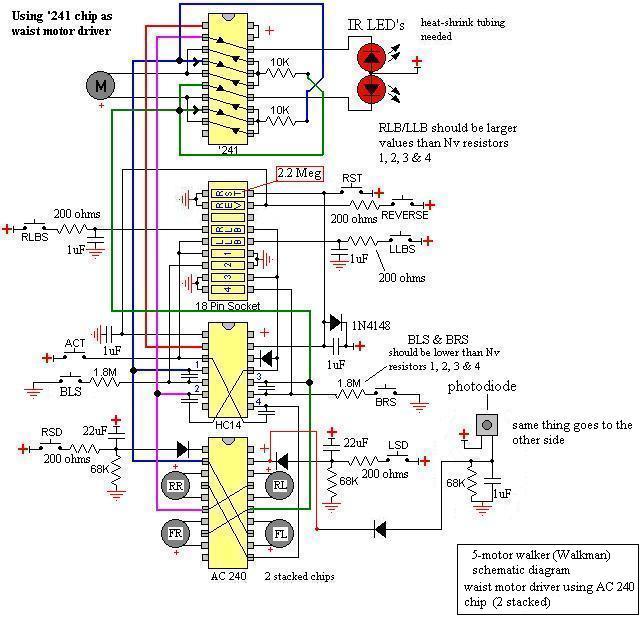
Using 74**241 chip as the waist motor driver (stacked)
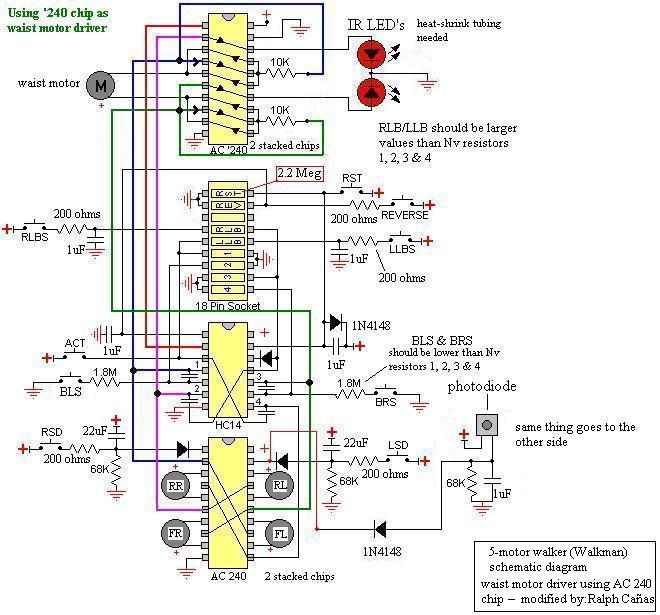
Using 74AC240 chip as the waist motor driver (stacked)
*Notice some changes in the wirings and the polarities of the IR LED's on the 2 "waist motor driver" diagrams*
Video Clips
Hi-resolution (taken from a camcorder w/ audio)
Leg_Lift 6.17 MB
Obstacle_Avoiding 6.12 MB
Phototaxis 7.70 MB
Phototropic 10.2 MB
Reversing 3.18 MB
Low-resolution (taken from a digicam w/o audio)
FwdRev 792 kb
LegLift 1.25 MB
Obstacle_Avoiding 1.25 MB
Phototaxis 1.64 MB
Phototropic 1.99 MB
Special thanks to Solarbotics, Mr. Ray Diaz, Ralph Cañas, Costa Rica BEAM site and to all BEAMers out there! Goodluck and happy BEAMing!
Copyright © 2005 by Harold R. Ilano (hetfield9999@yahoo.com).
All Rights Reserved.
BEAM Patents by Mark W. Tilden.
Visitors since Dec. 4, 2005